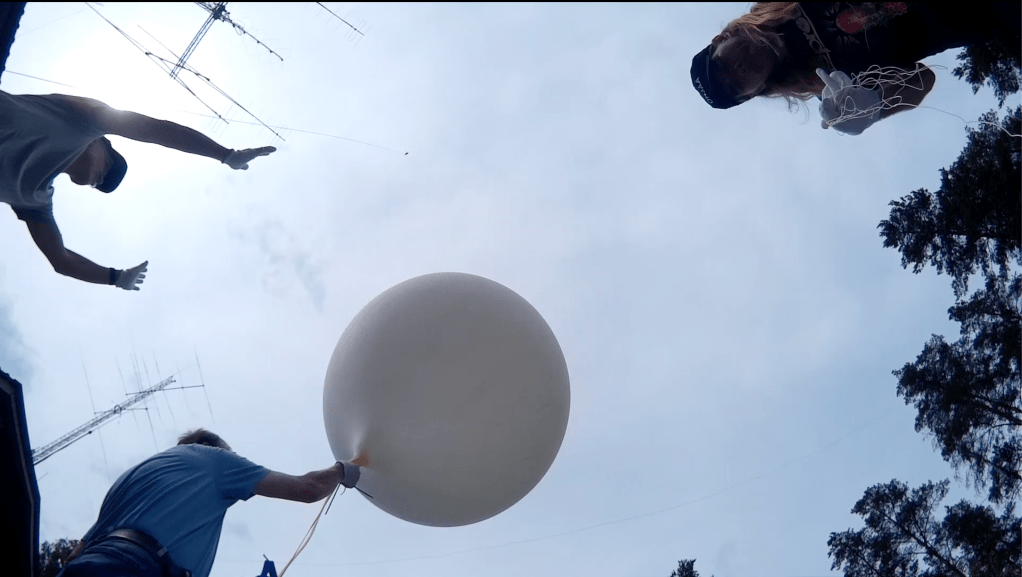
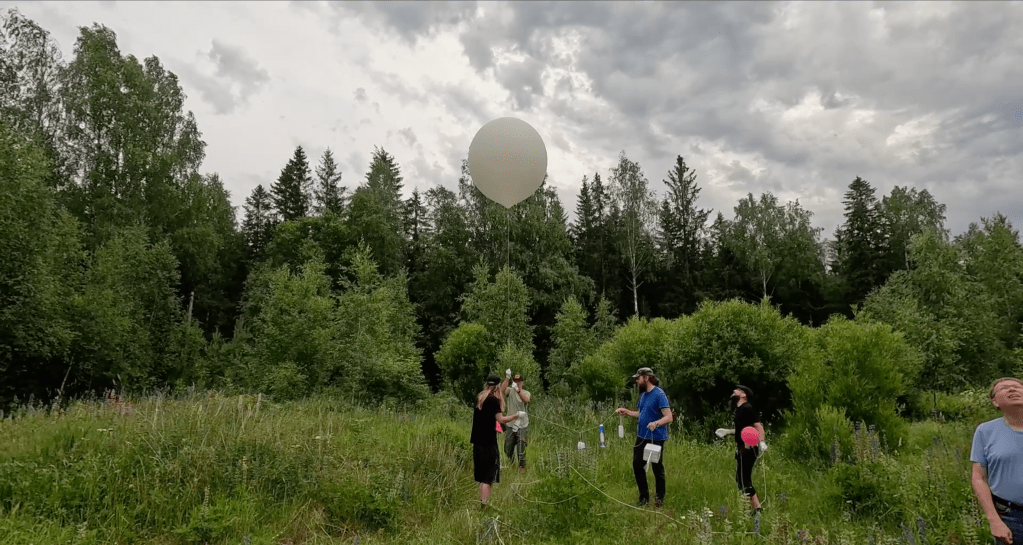
Hämeenlinnan Radioamatöörit ry OH3AA järjesti stratosfääripallolennon OH3HAB #9 28. kesäkuuta 2026. Päivän sääennuste vaihteli merkittävästi edeltävinä päivinä ja pallolennon toteuttamiseajankohta oli epävarma aivan viimeisiin tunteihin asti ennen lentoa sateen ja puuskaisen tuulen vuoksi. Voimakas tuuli vaikeuttaa pallon täyttämistä ja erityisesti pallon päästämistä ilmaan, sillä se voi ajautua kiinni puiden oksiin tai rakennuksiin. Pallolennon valmistelut aloitettiin kerholla iltapäivällä klo 14 jälkeen, koska sade oli tauonnut ja tuuli puuskaista vain ajoittain.
Alla Jounin OH3CUF tekemä videokooste pallolennon valmisteluista ja huippukohdista lennon aikana:
Artikkeli on melko pitkä, joten voit hypätä allaolevasta listasta haluaamasi kohtaan, esim. sensoritietoihin tai kuviin:
- Hyötykuorma ja seurantalaitteet
- Pallolennon keston suunnittelu
- Pallon täyttö vedyllä
- Pallolennon seuranta ja laitteiden nouto putoamispaikalta
- GNSS-häiriöt paikkatiedoissa
- Laitteiston laskeutumispaikka
- Sensoritietojen graafeja
- Seurantatietojen vastaanottajat
- Kuvia lennolta
Stratosfääripallolentoa olivat järjestämässä Jari OH3UW, Sami OH3EYZ, Jouni OH3CUF sekä Mikael OH3BHX. Mukaan valmisteluihin tulivat kerholta myös Jani OH3DBA sekä Jorma OH2KI. Lisäksi vieraaksi saapui Janne OH2OJA Espoosta!
Kiitokset kaikille pallolentoa seuranneille ja lähetteitä vastaanottaneille!

Hyötykuorma ja seurantalaitteet
Tämäkin stratosfääripallolennon pääasiallinen tarkoitus on olla radiotekninen koe erilaisille lähettimille, joita käytetään pallolennon seurantaan – sekä toki eeppisten kuvien ja videoiden taltiointi lennolta.
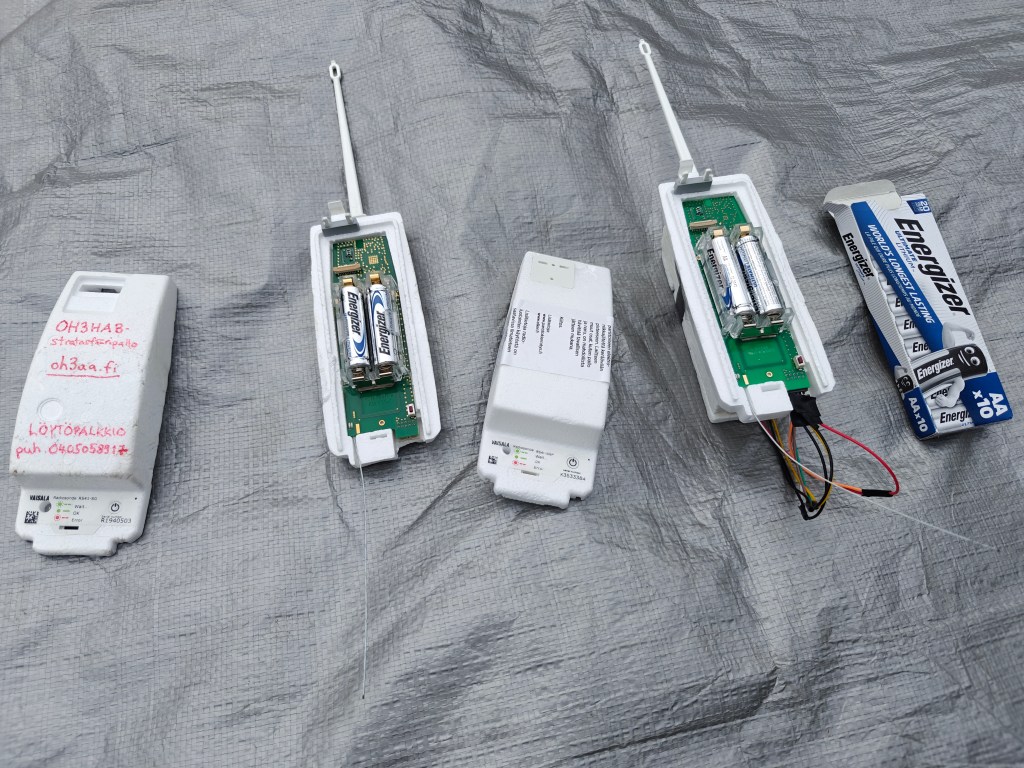
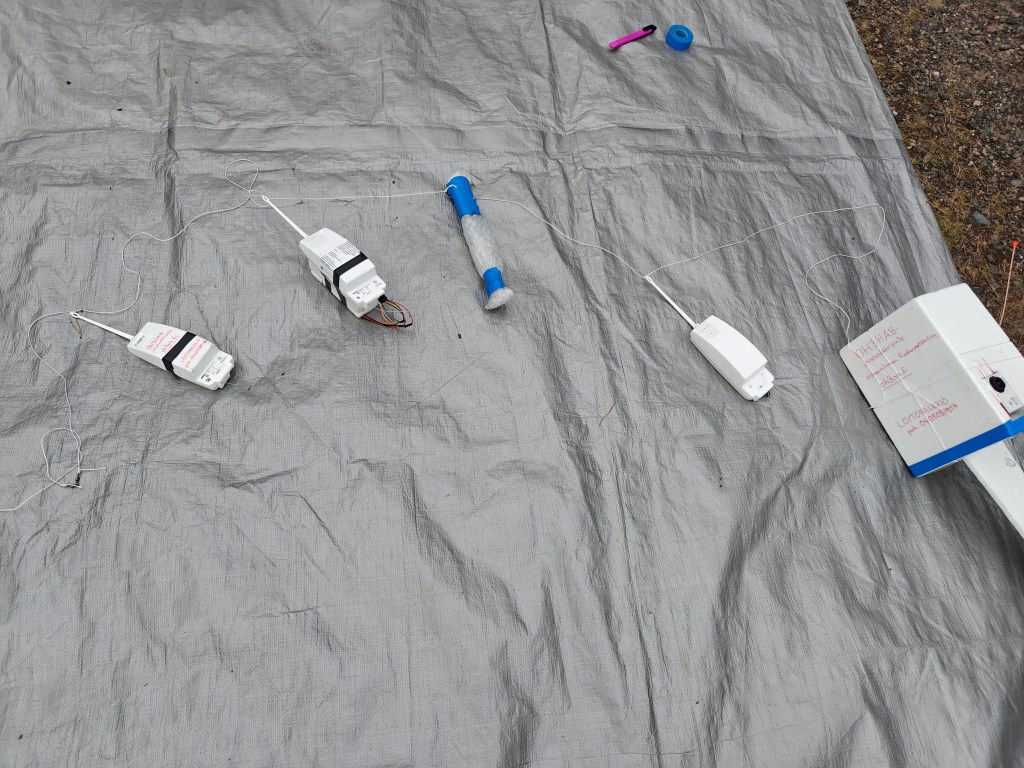
Hyötykuorma koostui seuraavista laitteista:
Uudelleenohjelmoidut RS41-radiosondit
Radioamatöörilähettimeksi uudelleenohjelmoidut Vaisala RS41-radiosondit.
- Kutsumerkillä OH3HAB: Vaisalan laitteistoversio RSM425, jossa uusi ublox UBX-M10 GNSS-paikkatietovastaanotin. Lähetteet:
- Horus Binary v3 – 432.300 MHz
- APRS 1200 baud – 432.500 MHz
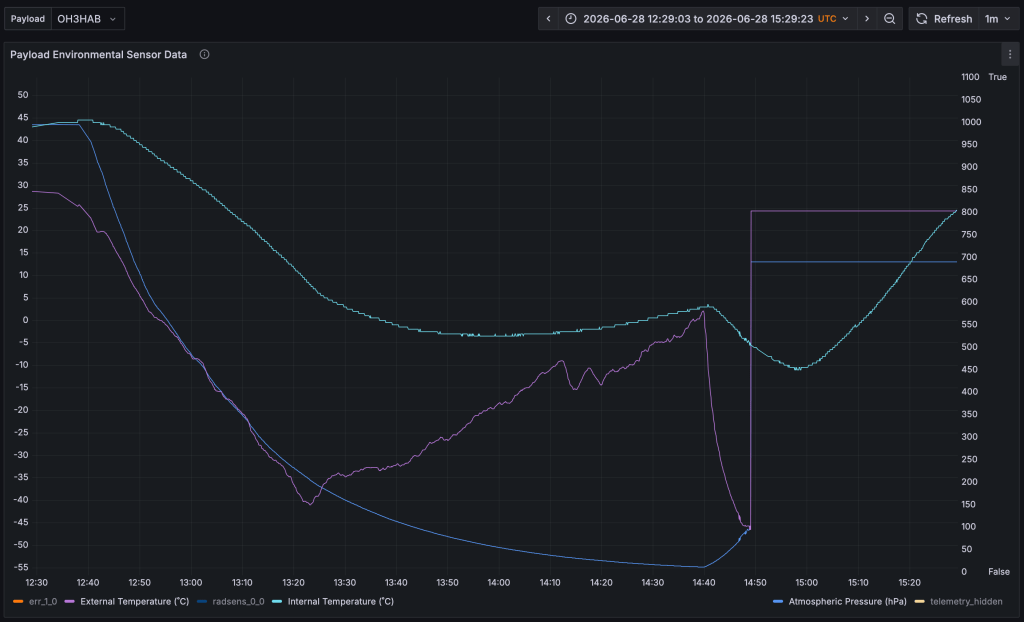
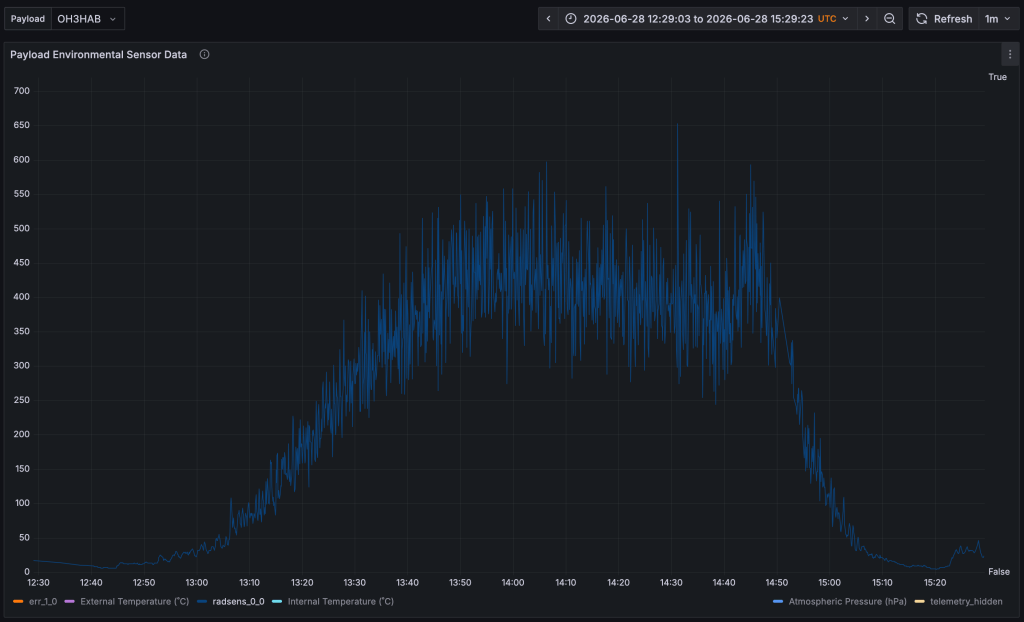
- Tähän radiosondiin oli kytketty kiinni I2C-väylään kaksi sensoria: Bosch BME280 (lämpötila, ilmankosteus ja ilmanpaine) sekä RadSens-säteilymittari Geiger-putkella!
- Kutsumerkillä OH3HAB-2: Vaisalan laitteistoversio RSM412, jossa vanhempi ublox 6010 GNSS-paikkatietovastaanotin. Lähetteet:
- Horus Binary v3 – 432.303 MHz
- Tämä seurantalaite oli varalla, koska emme olleet aiemmin käyttäneet uudempaa Vaisalan RSM425-sondia.

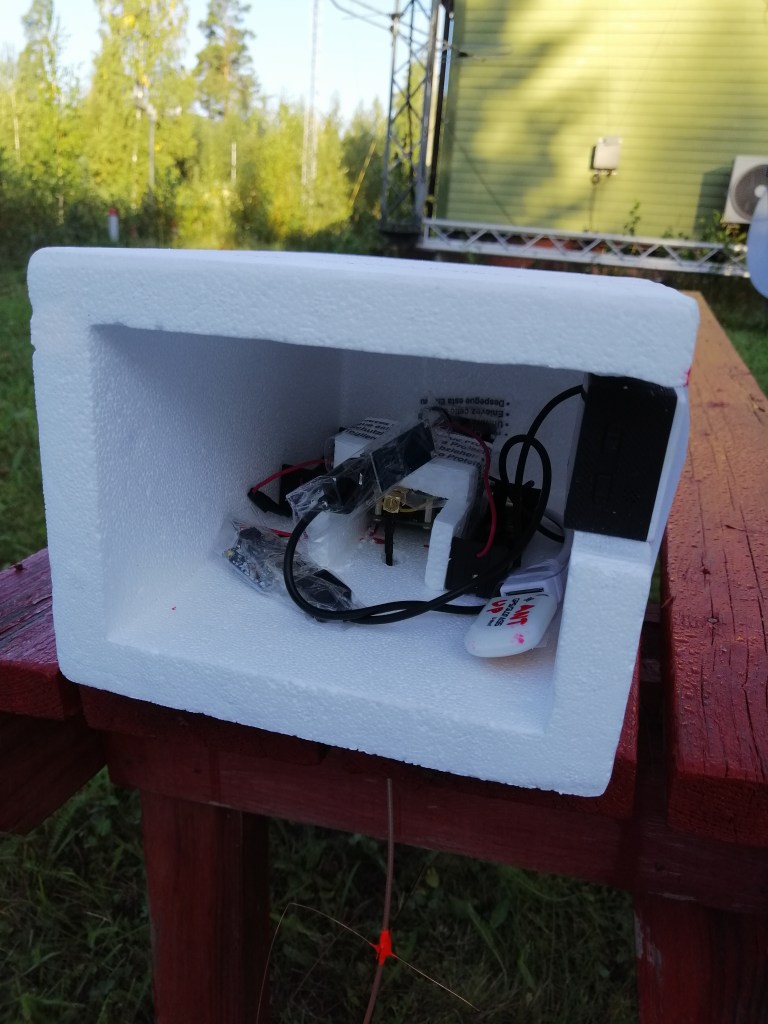
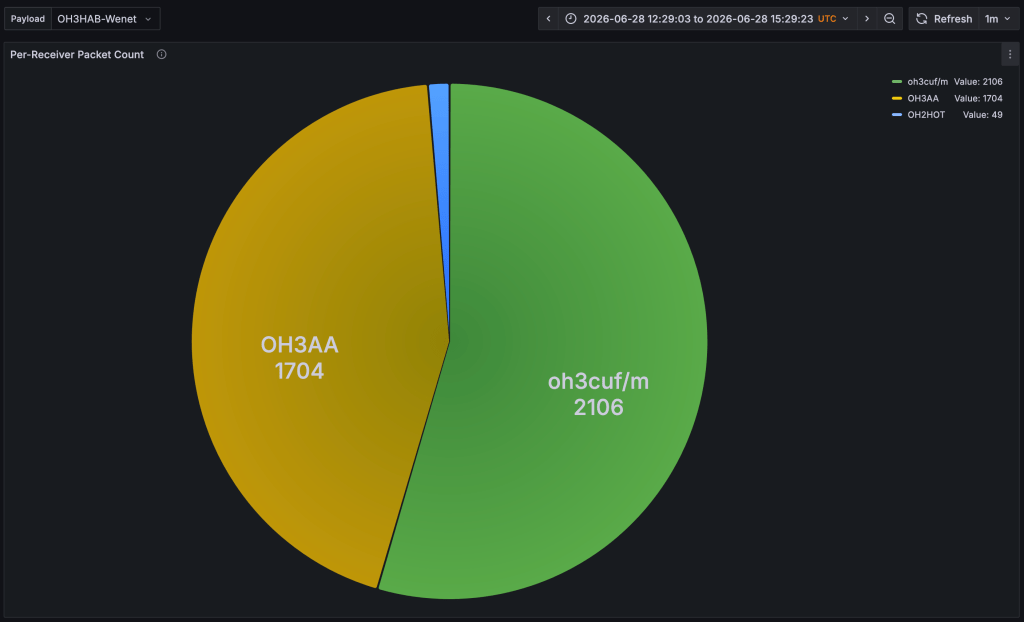
Wenet-kuvalähetin ja videokamera
Omassa suuremmassa stryox-laatikossa oli kuvauslaitteisto:
- Wenet-kuvalähetin taajuudella 436.750MHz
- Wenet-laitteisto: Raspberry Pi Zero W, Uputronics LoRa expansion board (RFM98W chip), geneerinen ublox GPS USB-tikku paikkatietoon
- Käytännössä LoRa-lähetintä käytetään 2FSK-lähettimenä Wenetissä – lähete ei siis ole LoRa-lähete.
- 18650-akku boost converterilla virtalähteenä
- Kevyt Full HD-videokamera (Lightdow LD4000) 18650-lisäakulla.

Meshtastic node ja MeshCore-toistin
Uutena kokeena lisäsimme mukaan LoRa/mesh-verkkolaitteita Mesh Pirkanmaan asetuksilla:
- Meshtastic node: EdgeFastLow – taajuus 869.4313 MHz
- MeshCore repeater (by Jouni OH3CUF) – taajuus 869.618 MHz
Saimme seuraavia raportteja kuuluvuudesta Meshtastic- ja MeshCore-aktiiveilta:
- ”Asikkala-Kotka-Tampere-Vantaa yhdistyi MeshCoressa”
- ”MeshCorella 51 telemetriaviestiä tuli tänne saaristoon, Publicilla ainakin Tampere (Vgo) ja Asikkala kuului. Observereiden mukaan kuului myös Seinäjoelle.”
- ”MeshCore kuului Hiittisiin ja Viroon asti”
- Meshtasticin puolella pallon lähetteet saattoivat peittyä muuhun liikenteeseen, paikkatietoa kyllä saatiin vastaanotettua jonkin verran.
Pallolennon keston suunnittelu
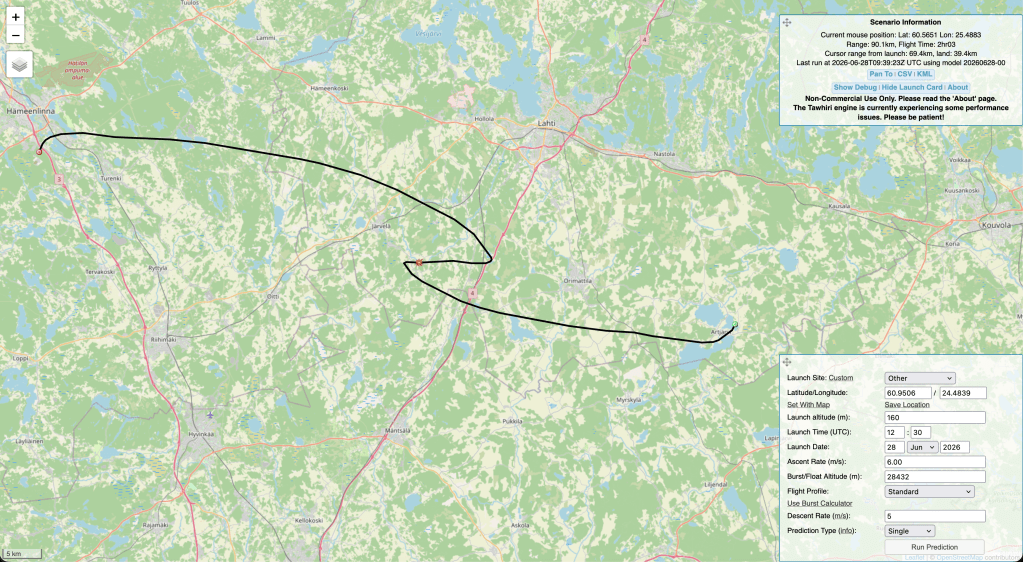
Tarkistimme lentoreitin ennusteen CUSF / SondeHub predictor -työkalulla ja ennuste näytti tuulten vievän palloa Artjärven seudulle eli melko kauas Hämeenlinnasta. Työkalu käyttää verkosta saatavaa avointa dataa ilmakehän tuulimittauksista. Seuraavan päivän ennuste sekä säälle että lentoreitille olisi ollut merkittävästi suotuisampi (aurinkoinen sää ja laskeutuminen alle 50km etäisyydelle), mutta päätimme silti toteuttaa lennon, koska tapahtumasta oli jo etukäteen sovittu.
Pallolennon kestoon ja maksimikorkeuteen voi vaikuttaa käytännössä vain lennon ajankohdalla (joka oli jo valittu) sekä palloon täytettävän vetykaasun määrällä, jolla määritellään pallon nousunopeus.
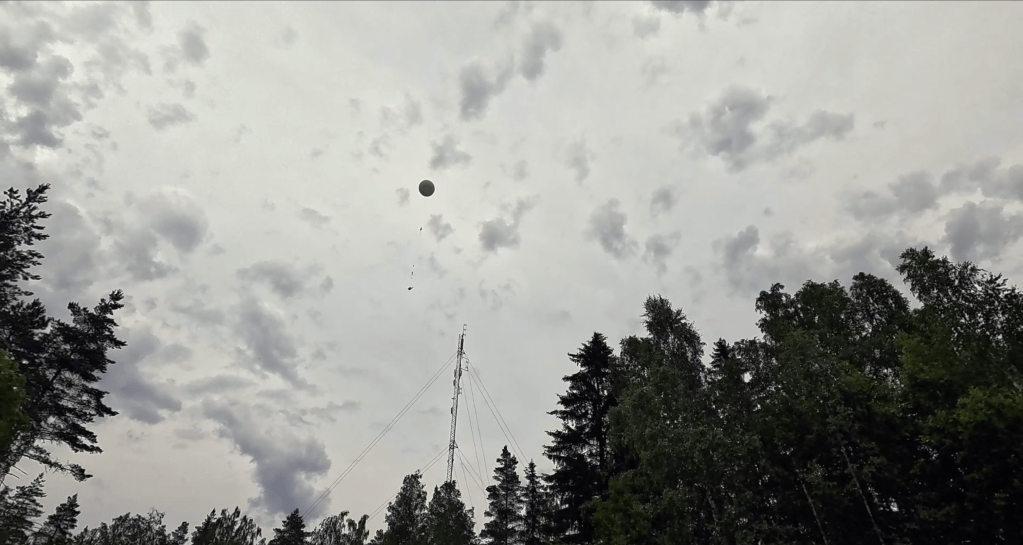
Pallon täyttö vedyllä
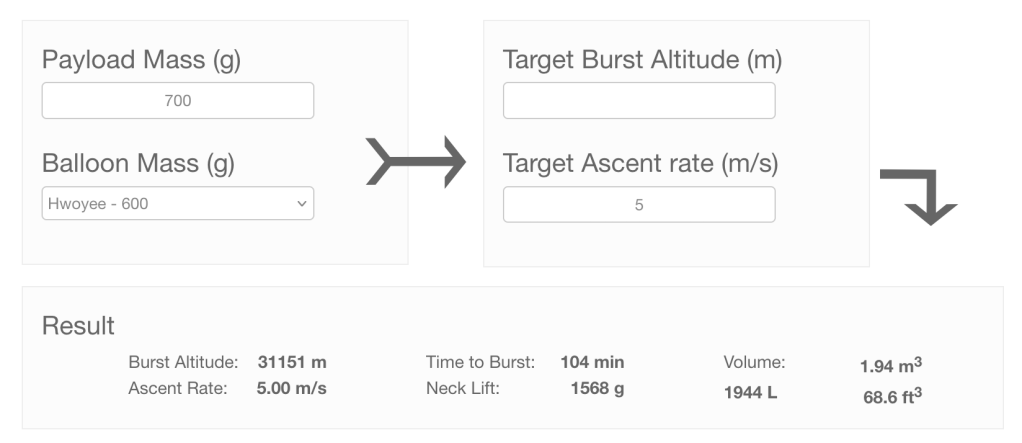
Itse lennolla käytettiin Hwoyeen 600g lateksipalloa, joka täytettiin vedyllä. Tavoitteena oli noin 5 m/s nousunopeus noin 700 gramman hyötykuormalle, johon sisältyy kaikki seurantalaitteet ja kamerat. Valittu nousunopeus eli 5 m/s on hyvä lähtökohta lyhyille pallolennoille, jolloin voi myös olla varma, että pallo nousee stratosfääriin asti ja puhkeaa eikä jää kellumaan. Suurempi nousunopeus vaatii enemmän kaasua ja johtaa lyhyempään lentoon eikä pallo nouse välttämättä yhtä korkealle, koska se laajenee nopeammin.
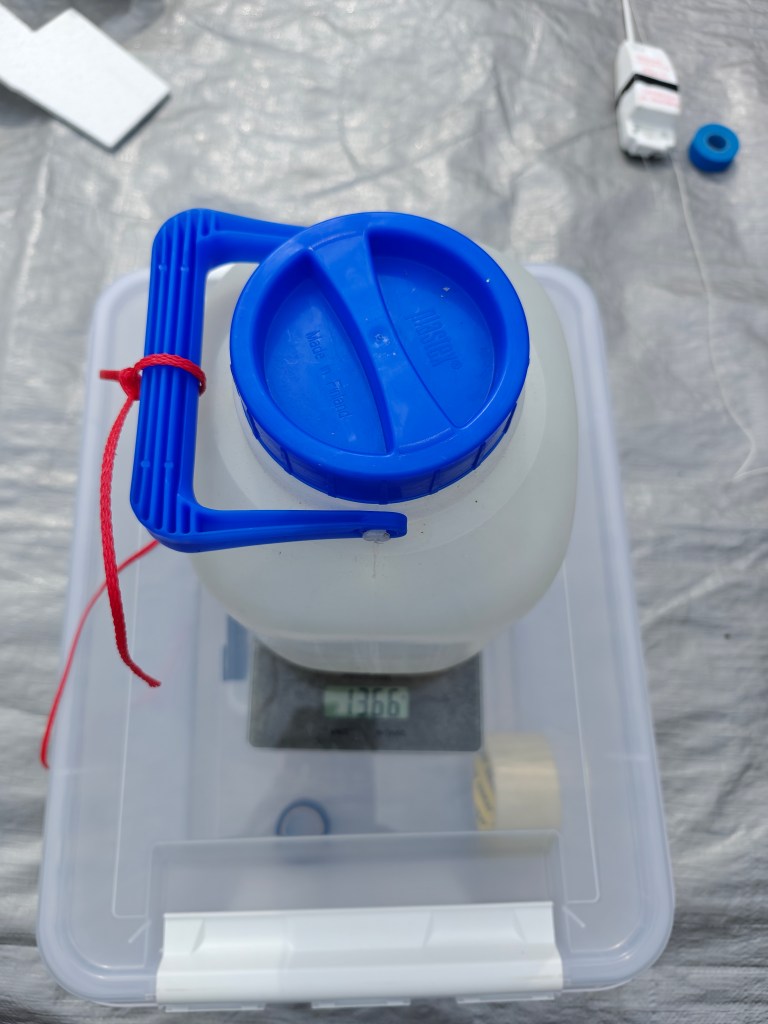
Palloon täytettävän vedyn määrä on helpointa todeta nosteesta, jonka pallo aiheuttaa siihen kytketylle painolle. Käytimme punnittua vesiastiaa painona, jolloin veden määrää oli helppo säätää sopivalle painolle. Käytimme SondeHub burst calculator -työkalua laskemaan tarvittavan nosteen määrän, joka oli noin 1568g. Päädyimme kuitenkin käyttämään hiukan matalampaa painoa, noin 1366 grammaa.


Pallolennon seuranta ja laitteiden nouto putoamispaikalta
Jotta pallolennon lähettimet ja laitteisto (ml. video- ja kuvamateriaali) saadaan takaisin talteen, on ne noudettava putoamispaikalta – yleensä välittömästi laskeutumisen jälkeen, kun seurantalaitteiden lähettimet ovat vielä toiminnassa ja tarkka paikkatieto on saatavilla lähialueilla.
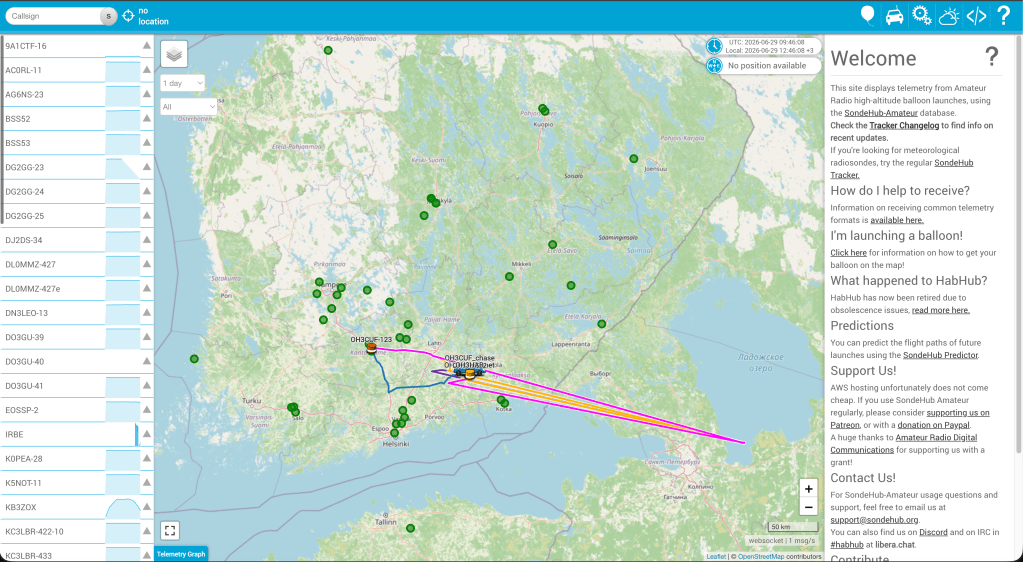
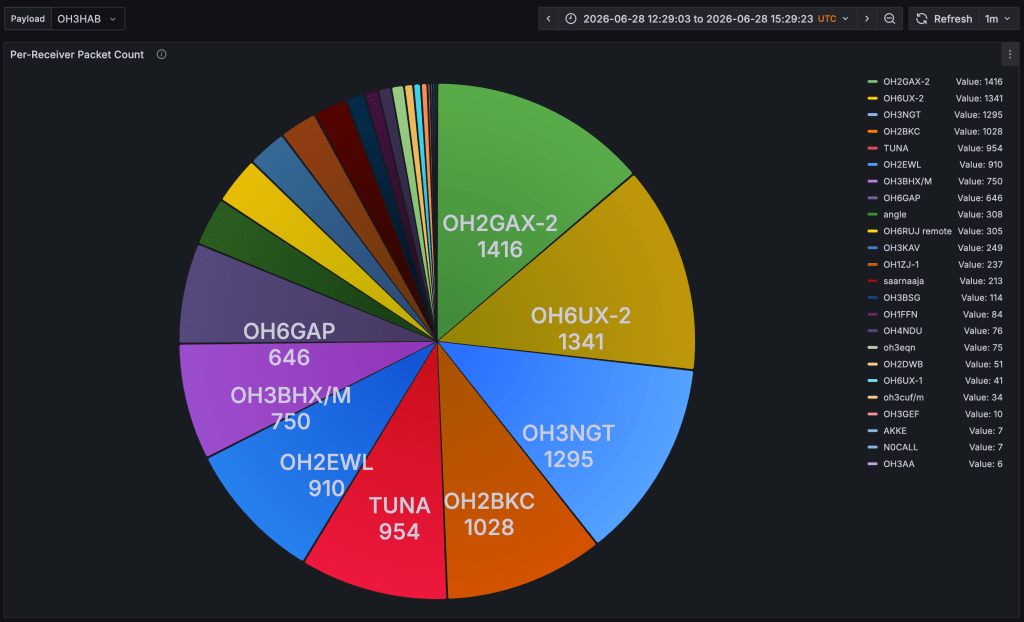
Jouni OH3CUF ja Mikael OH3BHX lähtivät automatkalle kohti Artjärveä (lentoennusteen mukaisesti) seuraten SondeHub Amateur-karttapalvelun reaaliaikaisesti päivittyvää lentoennustetta, joka perustuu pallon senhetkiseen vastaanotettuun paikkatietoon. Mukana autossa olivat toki Horus 4FSK- sekä Wenet-vastaanottimet. Lisäksi seurannassa auttoivat mukana olleet lukuisat Horus-vastaanottoasemat, jotka näkyvät kartassa tummanvihreinä ympyröinä!
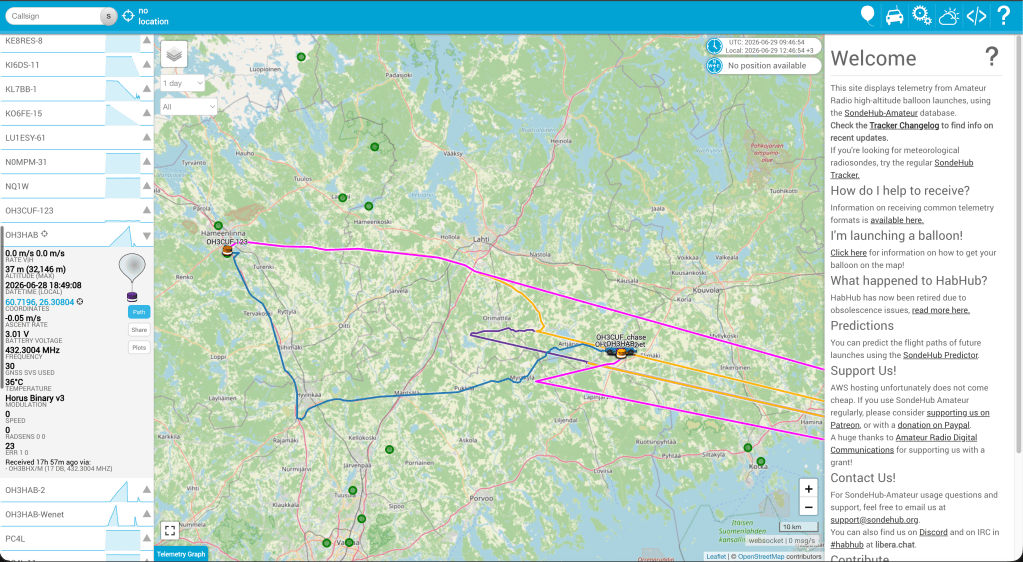

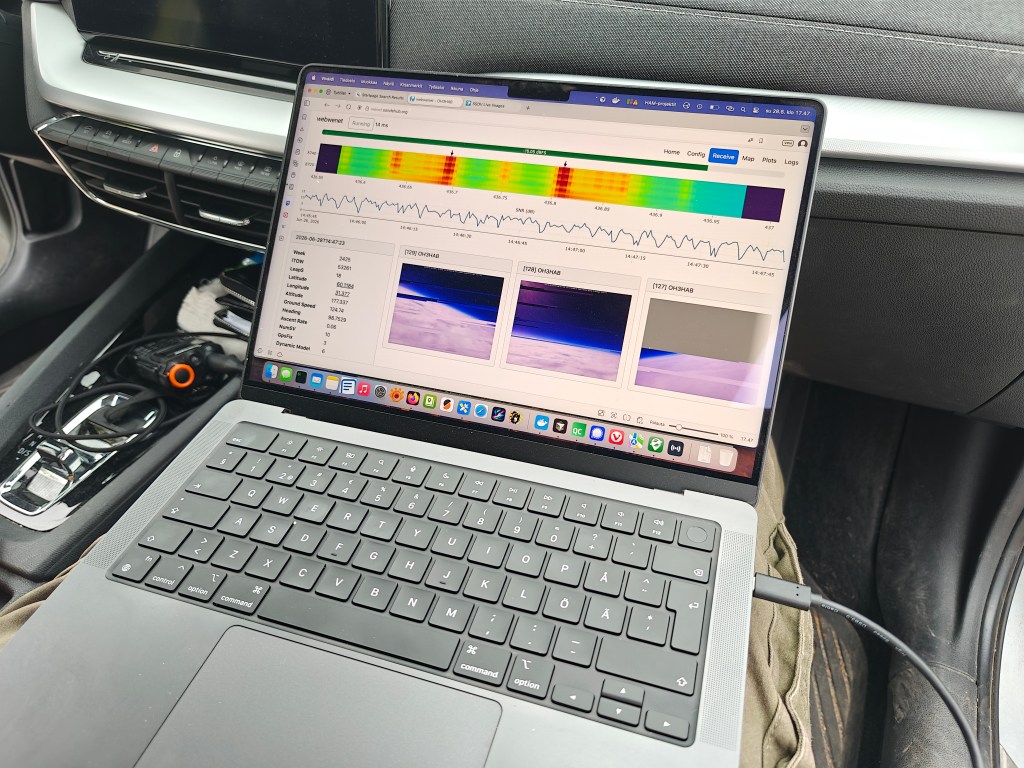
Seurasimme pallolentoa lähinnä Horus Binary v3-vastaanottimilla, johon tarvitaan käytännössä vain 70cm vertikaaliantenni, RTL-SDR-USB-tikku sekä web-selaimessa toimiva webhorus-ohjelma.
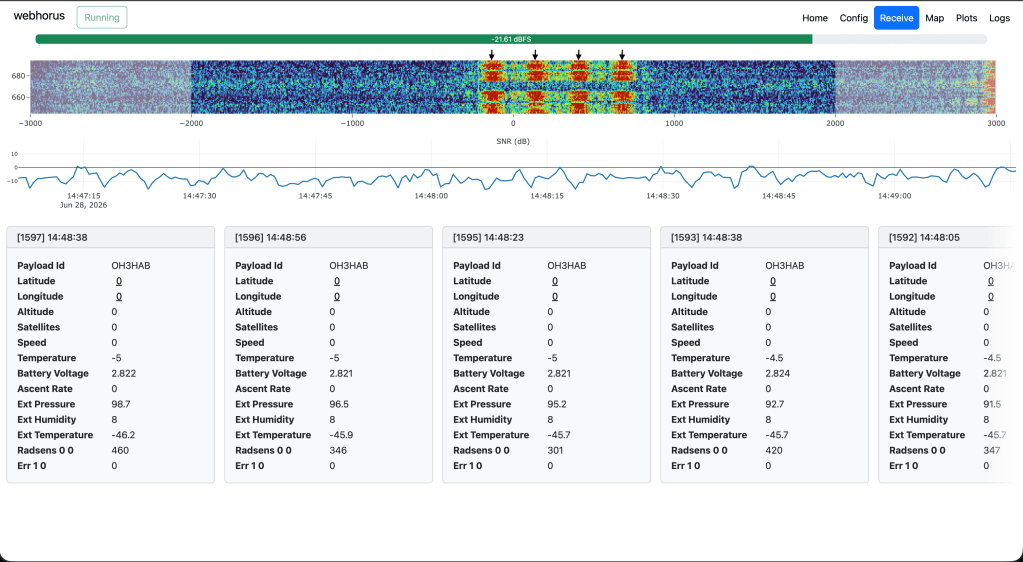
GNSS-häiriöt paikkatiedoissa
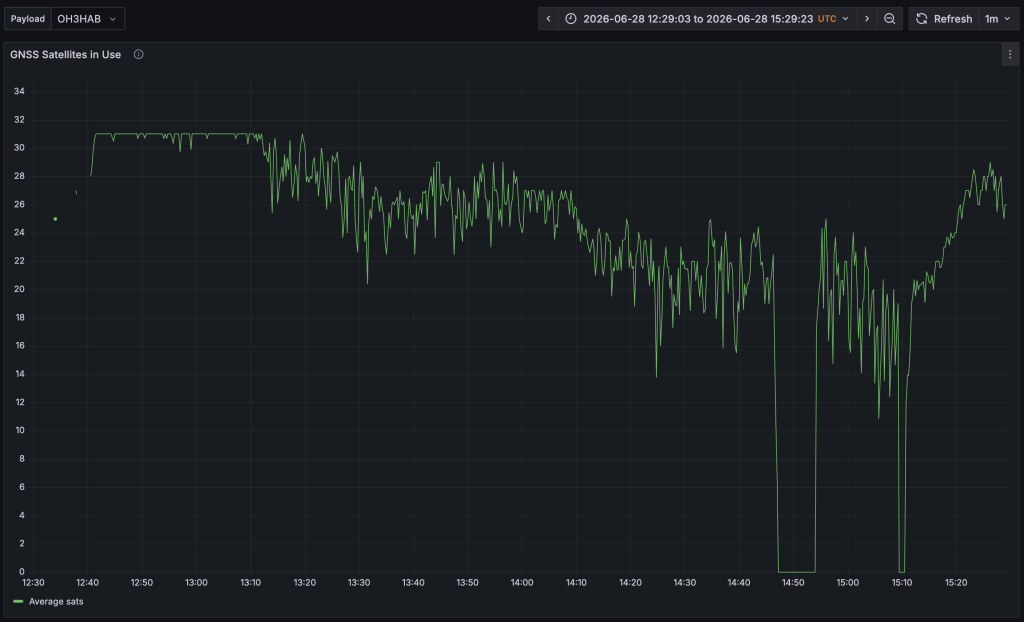
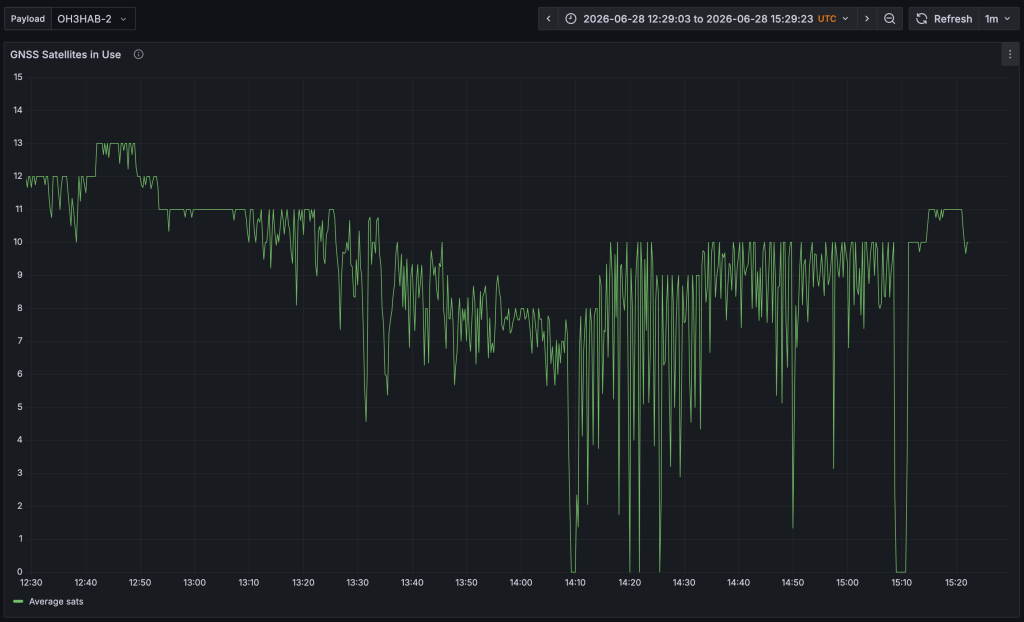
GNSS-häirintä aiheutti ongelmia pallolennon paikkatietojen seurannassa, jolloin kaikki kolme hyötykuorman paikkatietovastaanotinta (vanhempi ja uudempi RS41 sekä Wenet-lähettimen GPS-USB-tikku) eivät joko saaneet paikkatietoa ollenkaan tai paikkatieto siirtyi Laatokan ylle.
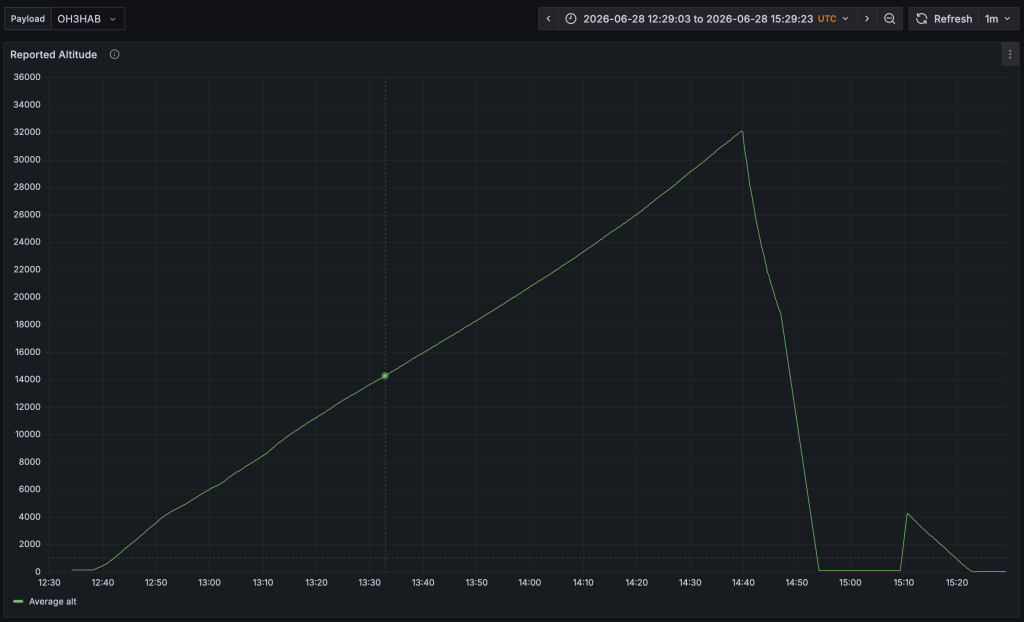
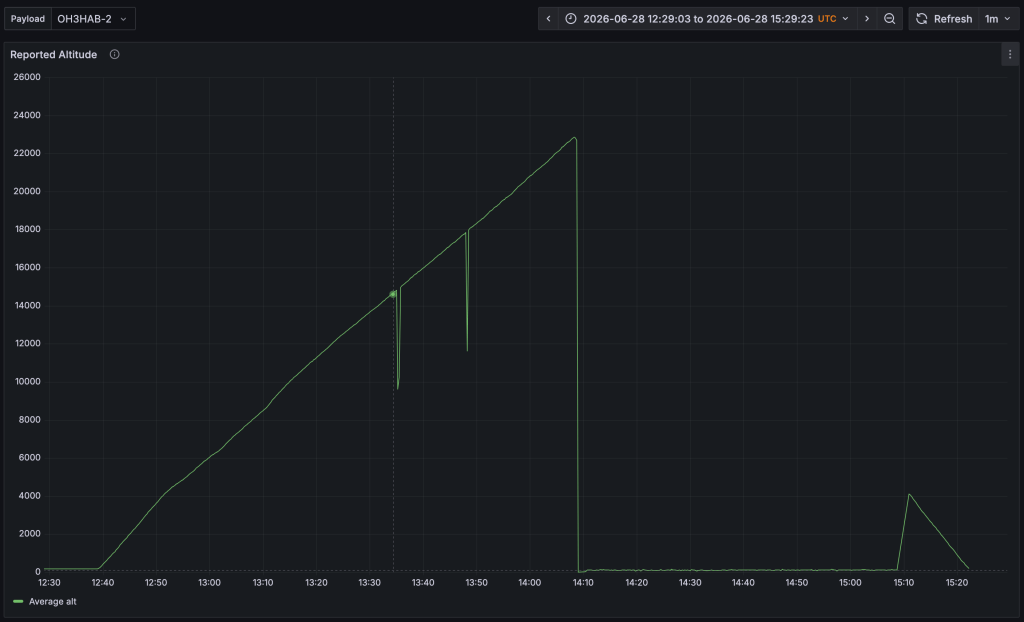
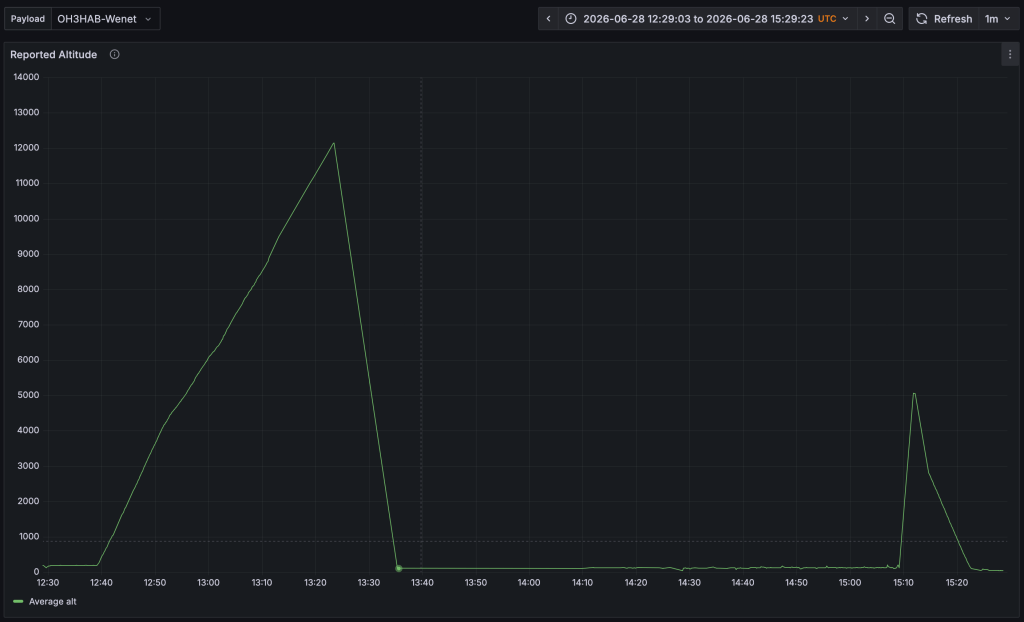
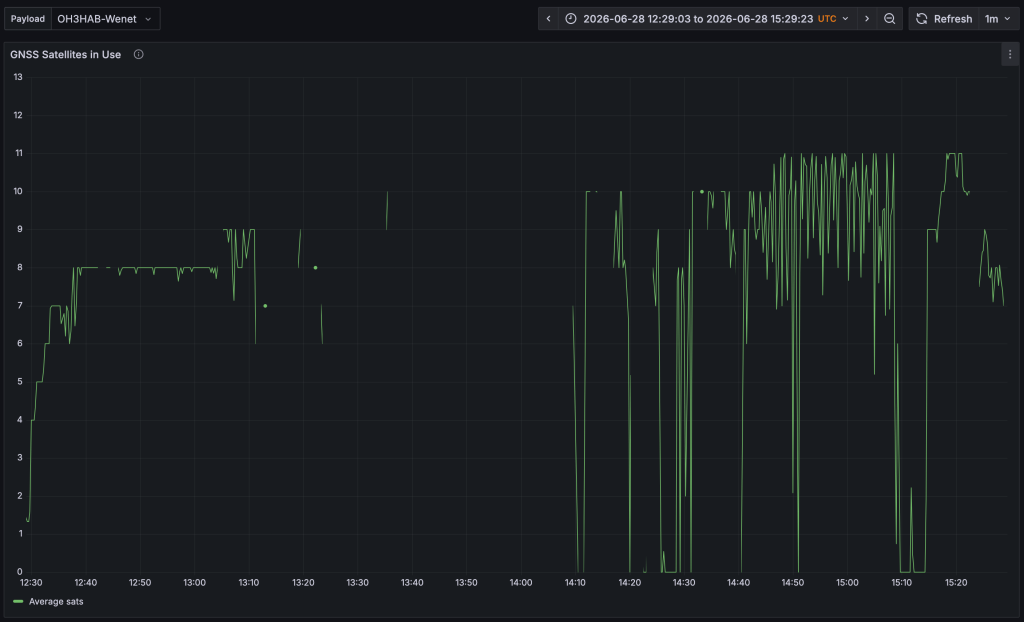
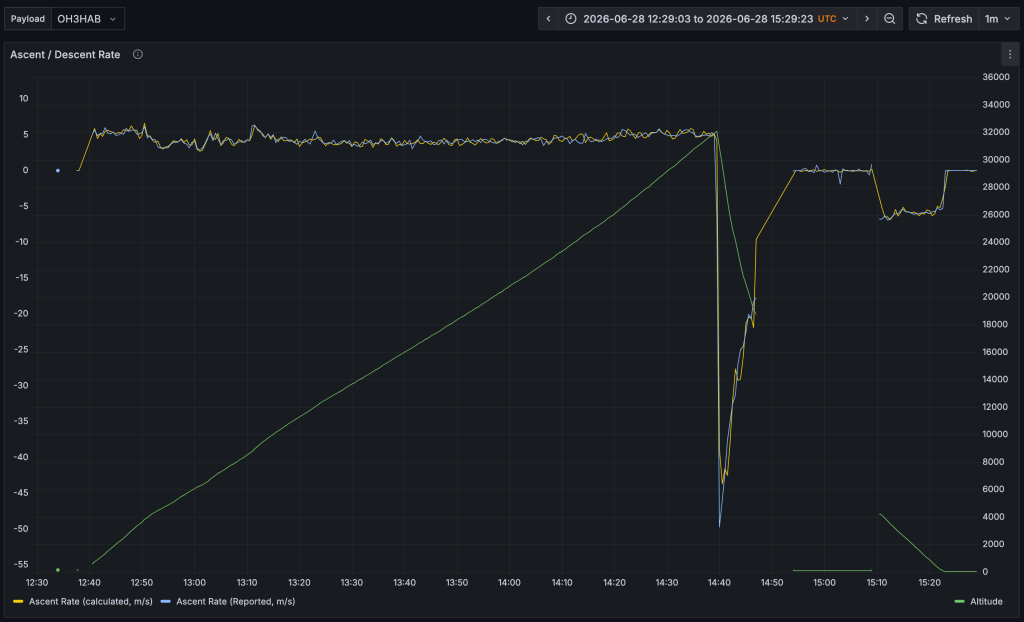
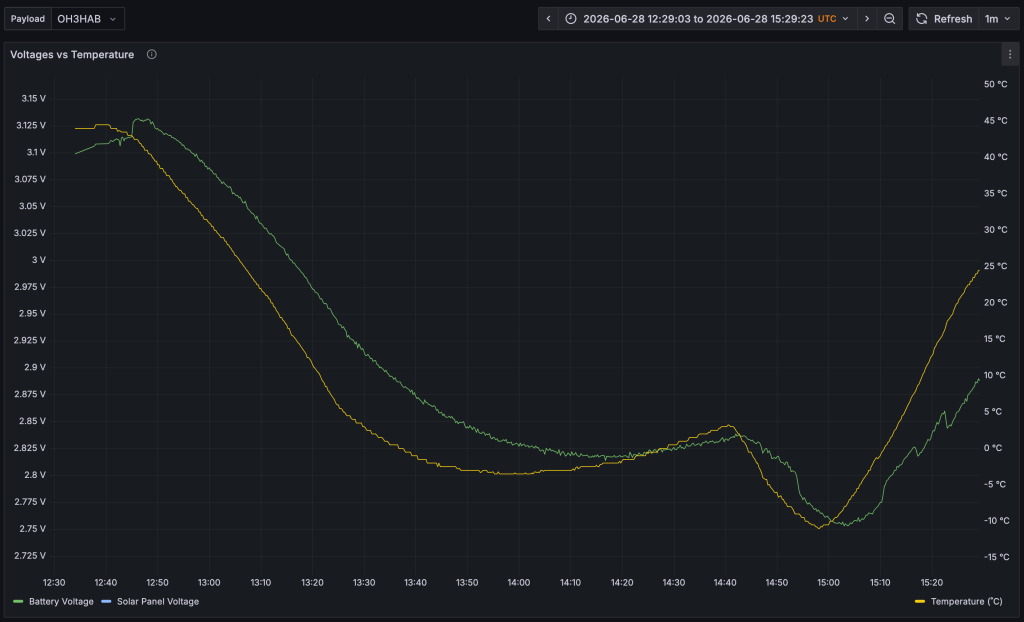
Alla olevista graafeista (ladattu SondeHubin Grafana-työkalusta) näkee miten uudempi ublox:in GNSS-vastaanotin (RSM425-version radiosondissa) toimii huomattavasti paremmin kuin vanhemmat RSM412-version sondissa sekä Wenet-lähettimessä.
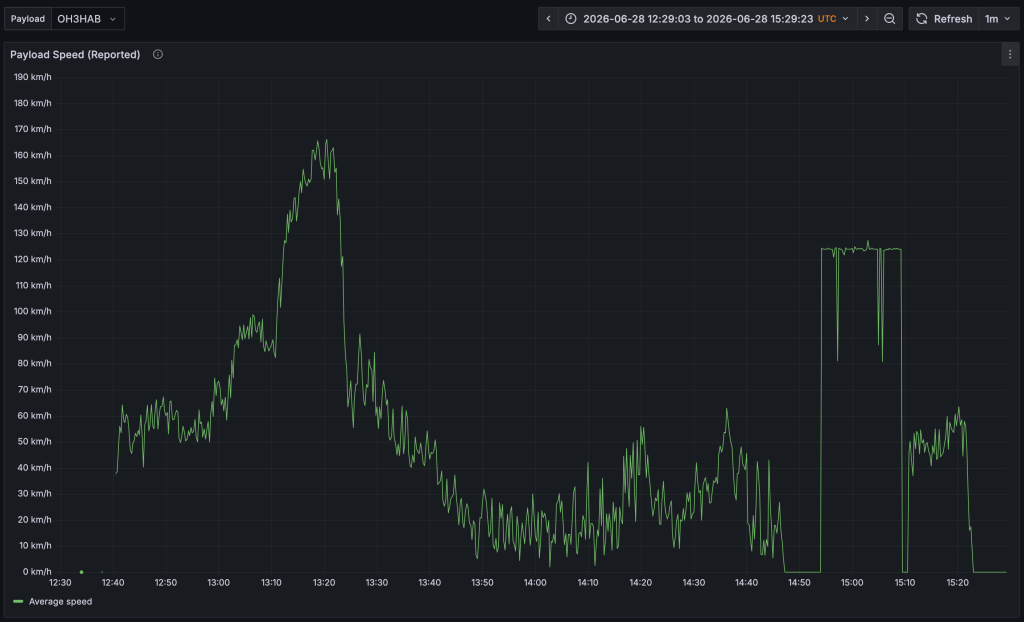
Häiriöt alkoivat noin 12 kilometrin korkeudessa nousussa ja kestivät aina laskuun asti kunnes hyötykuorma oli alle 3 kilometrin korkeudessa. Tämän vuoksi lentoa oli hankala seurata ja jouduimme hakumatkallamme odottelemaan paikkatietojen palautumista.
Uudemman radiosondin paikkatietojen perusteella saimme varmistettua, että pallo kohosi noin 32 kilometrin korkeuteen.
Uusi RSM425-radiosondi
Vanhempi RSM412-radiosondi
Wenet-lähettimen paikkatiedot
Laitteiston laskeutumispaikka
Stratosfääripallolennon laitteiston tarkkaa laskeutumispaikkaa on vaikea ennustaa jatkuvasti muuttuvien tuulien vuoksi. Lisäksi putoamista hidastava laskuvarjo tuo tähän oman lisänsä tehden laskeutumisvauhdista vähemmän ennustettavan.
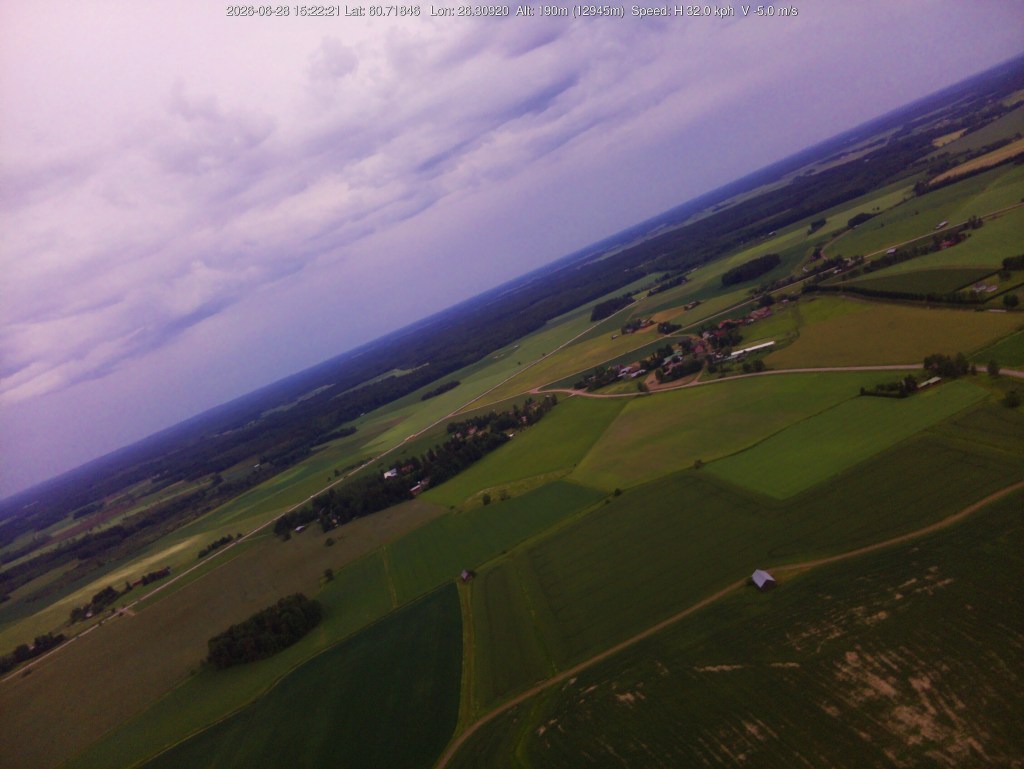
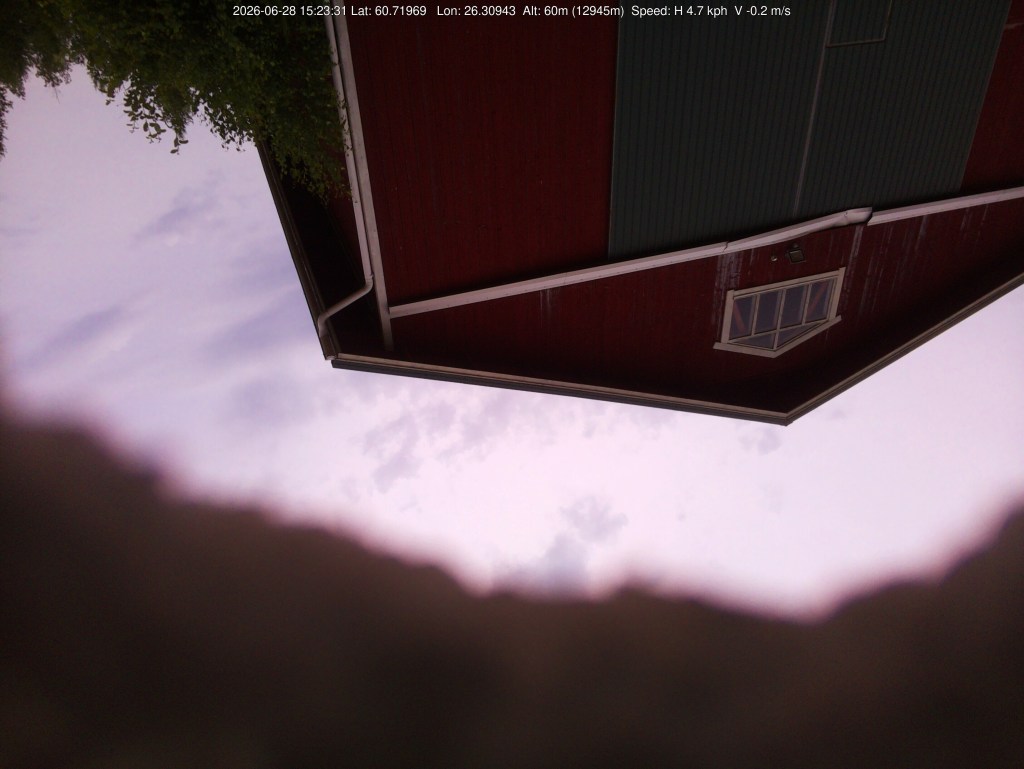
Moni pallolentomme on laskeutunut metsään tai jäänyt hiukan puihin kiinni. Aiempi, vuoden 2023 wenet-kuvalähetelento putosi jokeen, Nokianvirtaan. Tällä kertaa meillä oli kuitenkin onnea ja laitteet laskeutuivat kuin tilauksesta erään maatalon pihapiiriin. Viimeisissä vastaanotetuissa Wenet-kuvissa näkyikin jokin rakennus.
Laitteiden nouto olikin lopulta helppoa: kävimme ensin toki maatilan omistajien asunnolla kertomassa mitä etsimme ja pääsimme näin paikan päälle keräämään laitteet.


Sensoritietojen graafeja
Seurantatietojen vastaanottajat
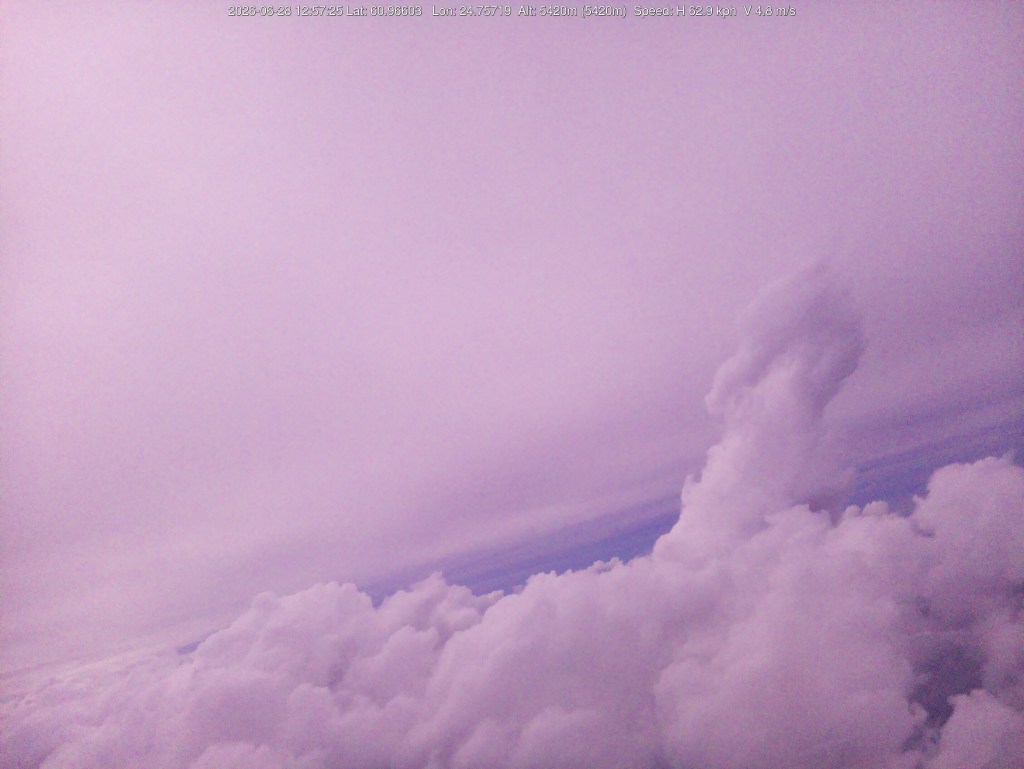
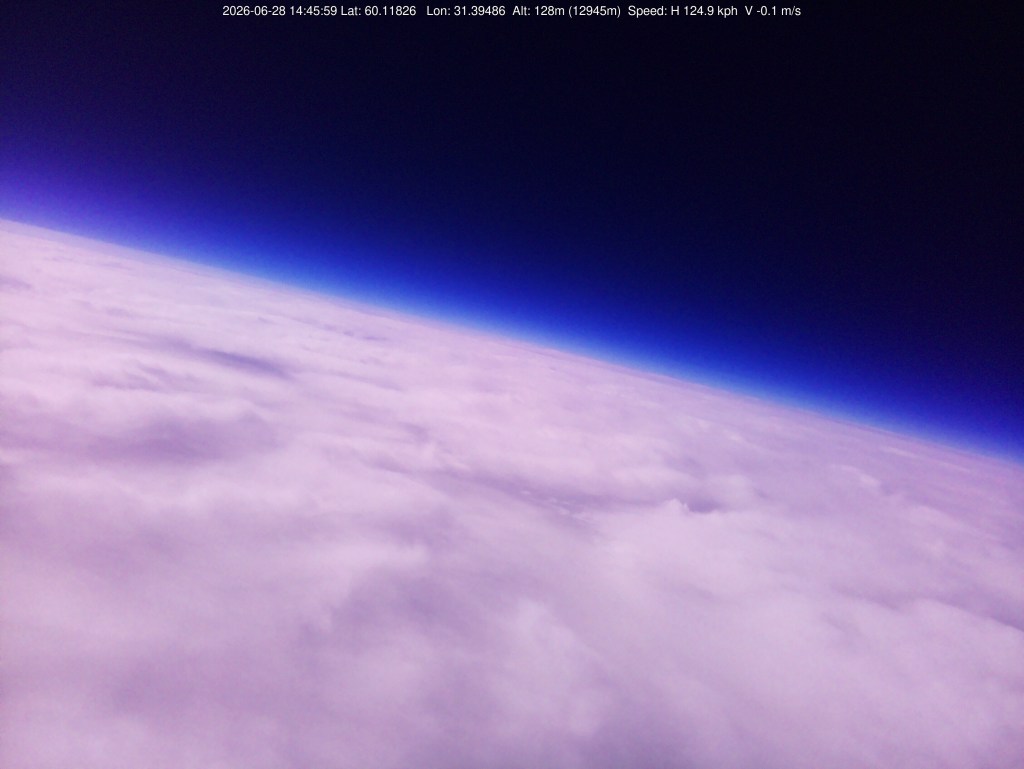
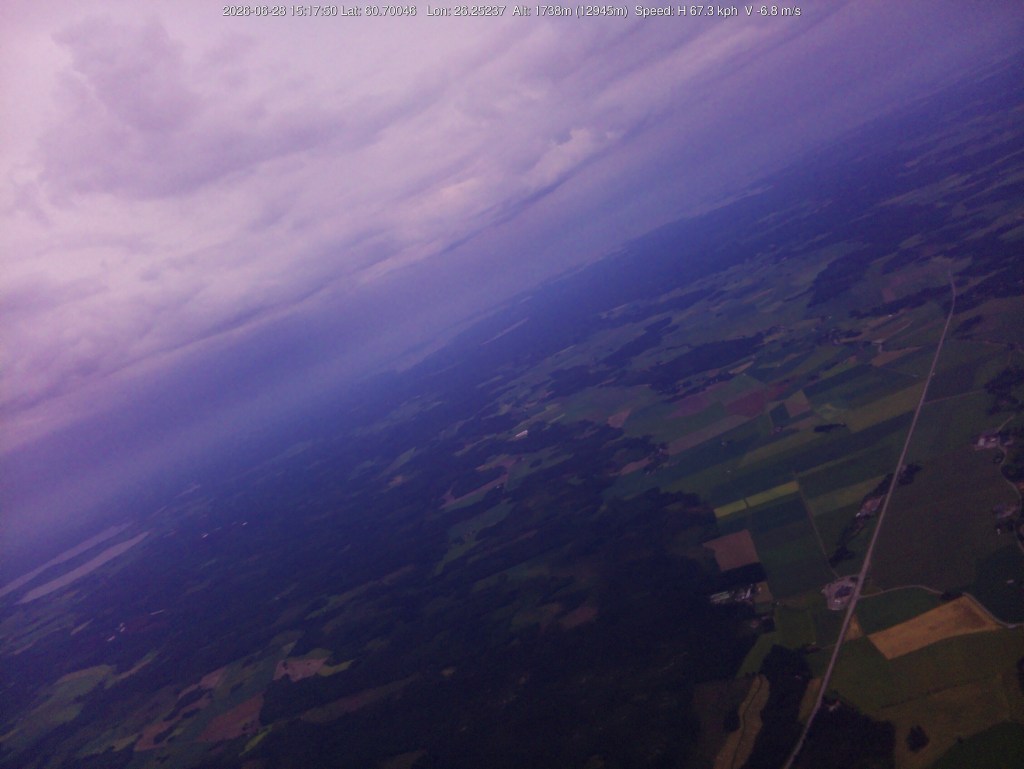
Kuvia lennolta
Still-kuvia videokamerasta


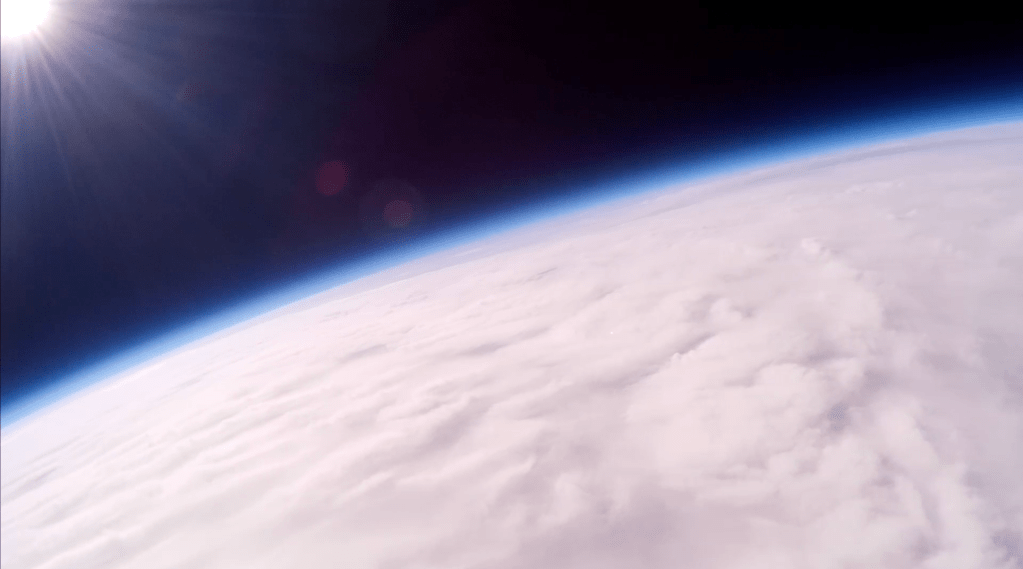
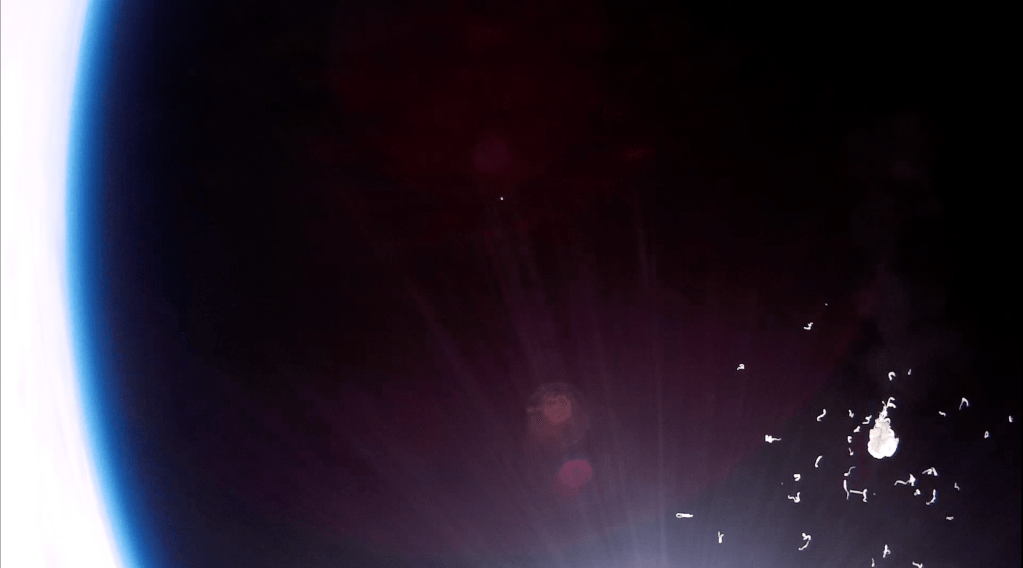
Wenet-kuvalähettimen still-kuvia
Huomaa, että paikkatiedot ovat osassa kuvista virheelliset paikkatietohäirinnän vuoksi.