

Päivitetty: 1.8.2021
Hämeenlinnan Radioamatöörit ry, OH3AA, järjesti lauantaina 17.7. stratosfääripallolennon radioamatöörikutsulla OH3VHH. Lento onnistui pieniä teknisiä haasteita lukuunottamatta erittäin hyvin. Lentopäivän sääennuste oli erinomainen: aurinkoista, täysin pilvetöntä säätä oli luvattu koko päivälle lämpötilan noustessa ylimmillään noin 27 C-asteeseen ja tuuliennuste maan pinnalle oli 1-2 m/s. Nämä ovat lähes täydelliset olosuhteet pallolentoa ajatellen. Lisäksi järjestämämme YouTube-livelähetys keräsi yli 200 yhtäaikaista katsojaa ulkomaita myöten ja lähetyksen chatissa oli vilkasta keskustelua. Pallolentoa olivat suunnittelemassa ja järjestämässä Hämeenlinnan Radioamatöörit ry:stä Jari OH3UW, Sami OH3EYZ sekä Mikael OH3BHX.
Katso videokooste pallon lähetyksestä sekä lennosta. Koosteessa on käytetty videomateriaalia pallon hyötykuorman kameroista full HD-kameroista:
Tämä artikkeli on lyhyt tiivistelmä pallolennosta. Tarkempia tietoja ja kattavampi kuvakooste on Mikaelin, OH3BHX, blogissa sivulla: https://0xfeed.tech/2021/07/high-altitude-balloon-oh3vhh-1-launch-and-flight/ (englanniksi)
Taustatietoja pallolennosta ja sen laitteistosta on suomeksi artikkelissa Stratosfääripallolento OH3VHH-1 lauantaina 17.7.: vastaanota pallon APRS-paikkatietoja tai DVB-S-videolähetettä! sekä englanniksi Mikaelin, OH3BHX, blogissa sivulla: https://0xfeed.tech/projects/oh3vhh-1/

Etualalla Woikoskelta vuokrattu vetykaasupullo pallon täyttämistä varten. (kuva OH3EYZ)
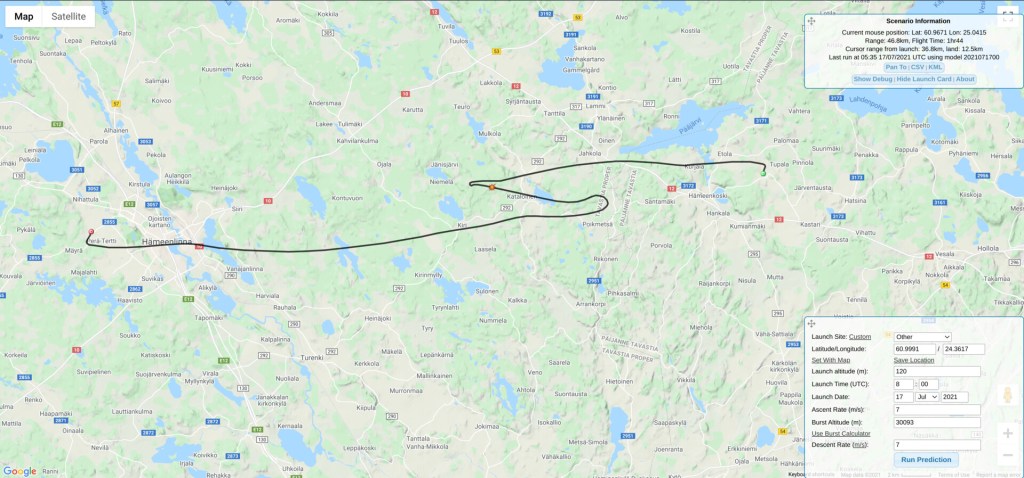
Lentoreitin ennuste
Käytimme CUSF Landing Predictor-palvelua lentoreitin ennusteisiin, joiden tavoitteena oli varmistua, että pallon hyötykuorma ei lennä liian kauas eikä se putoa järveen. Ennusteiden mukaan tuulen suunta yläilmakehässä lentopäivänä veisi pallon Hämeenlinnasta itään, Lahden lähialueille.

Ensimmäiset ennusteet lentopäivälle käyttäen suunniteltua 5 m/s nousunopeudella olisivat tosin vieneet pallon suoraan Lahden Vesijärven keskelle, joten päädyimme täyttämään palloa suuremmalla määrällä vetyä, jotta saimme nousuvauhdiksi lähes 7 m/s. Tämän avulla pallo kohoaisi nopeammin puhkeamiskorkeuteen eikä siten kulkeutuisi niin kauas välttäen Lahden lähialueiden järvet.
Pallon lähetys
Aloitimme pallolennon valmistelut hieman aamuyhdeksän jälkeen peltoalueella lähellä Tiirinkoskea, Hämeenlinnan pohjoispuolella. Järjestimme tapahtumasta Suomen Radioamatööriliiton YouTube-tilillä suoratoistotapahtuman, jossa oli mahdollista seurata lennon valmisteluja sekä pallon lähettämää DVB-S1-videokuvaa. Livelähetys on katsottavissa YouTubessa — pallo lähetetään lentoon noin kahden tunnin kohdalla lähetyksessä.

Lennon lähetystä saapuivat avustamaan kerhon pitkäaikaiset jäsenet Henri OH3JR sekä Seppo OH7Z. Lisäksi paikalla olivat mukana Martti OH1ON, Rami OH3RAMI sekä Kari OH3EVO.

Taustalla Mikael OH3BHX, Kari OH3EVO, Rami OH3RAMI sekä Seppo OH7Z. (kuva OH1ON)


Pallon täyttäminen ja lähetys sujuivat ongelmitta, mutta hyötykuorman laitteiston suhteen meillä oli haasteita saada APRS-seurantalaitteita toimimaan luotettavasti. 2 metrin bandilla toimiva APRS-paikkatietolähetin ei jostain syystä saanut GPS-lukitusta, kun hyötykuormalaitteisto oli maan pinnalla. GPS-lukitus alkoi onneksi toimia juuri ennen pallon lähetystä, kun pallo nosti hyötykuorman laatikkoa korkeammalle ilmaan.



Pallon seuranta onnistui hyvin sekä 2m APRS-paikkatietojen että 70cm LoRa-lähetteeseen perustuvan seurantalaitteemme avulla. Sen sijaan RS41-radiosondiin perustuvassa 70cm APRS-lähettimen GPS-paikkatiedoissa oli toistaiseksi tuntemattomasta syystä virheitä, kun pallon korkeus ylitti 10 kilometriä.
Pallon hyötykuormalaitteiston kerääminen talteen
Pallon nousu 28.3 kilometrin maksimikorkeuteen kesti 1 tunnin ja 25 minuuttia. Putoaminen takaisin maahan kesti vain 27 minuuttia, joten lennon kokonaiskesto oli noin 1 tunti 25 minuuttia. Pallon hyötykuorma putosi Hollolaan, 12-tien pohjoispuolelle, lähelle mobiiliverkkomastoa.

Putoamispaikan vieressä oli tie, jonne pääsi kätevästi autolla, mutta itse putomaispaikka oli keskellä erittäin tiheää ja vaikeakulkuista metsää. Suuri määrä hyttysiä ja paarmoja ei myöskään auttanut etsintäämme :)

Putoamispaikan läheisyyteen saavuttuamme yritimme saada hyötykuorman tarkan sijainnin autossa mukana olleilla APRS- ja LoRa-vastaanottimillamme. Pian kävi kuitenkin ilmi, että 2 metrin APRS-lähettimellä ja LoRa-lähettimellä ei ollut enää GPS-lukkoa, joten niiden avulla paikkatietoa ei saanut. RS41-radiosondista rakennettu 70 cm bandilla toimiva APRS-paikkatietolähetin oli vielä toiminnassa, mutta sen lähettämät paikkatiedot olivat epätarkkoja — sen ilmoittama paikka vaihteli jopa yli 50 metrillä suunnasta toiseen.

Lopulta vaihtoehdoksi jäi yksinkertaisesti kävellä metsään etsimään hyötykuormalaatikkoa. Palasimme kuitenkin pian takaisin, koska metsä oli niin vaikeakulkuista ja otimme mukaan lyhyen yagi-suunta-antennin sekä kannettavan tietokoneen SDR-radiovastaanottimella, jotta voisimme etsiä hyötykuormaa oikeasta suunnasta radiolähetteiden perusteella antennia suuntaamalla.

Hyötykuormalaatikko löytyi lopulta suuntauksen avulla helposta paikasta maasta. Kaikki laitteisto oli säilynyt toimintakunnossa, videokamerat tallensivat vielä videota ja jopa kuparilangasta tehty QFH-antenni oli säilynyt ehjänä, koska laatikko oli pudonnut kyljelleen. Samalla kävi ilmi myös, että GPS-lukituksen puuttuminen ja paikan epätarkkuus johtui tästä asennosta: GPS-antennit olivat laatikon ”yläpuolella” eivätkä ne toimi hyvin sivuttaisessa asennossa.

Kuvia lennolta
Raspberry Pi-laitteistoon pohjautuvassa seurantalaiteessa oli mukana Raspberry Pi HQ-kamera, jolla laite otti kuvia lennolta noin 30 sekunnin välein. Alla muutama kuva lennolta. Tarkempia tietoja ja kattavampi kuvakooste on Mikaelin, OH3BHX, blogissa sivulla: https://0xfeed.tech/2021/07/high-altitude-balloon-oh3vhh-1-launch-and-flight/ (englanniksi)







Julkaisemme pian vielä lyhyen videokoosteen pallon lähetyksestä sekä lennosta.
Kiitokset kaikille lentoprojektiin osallistuneille sekä lennon lähetyksessä mukana olleille!
